
produk Kategori
- FM Transmitter
- 0-50w 50w-1000w 2kw-10kw 10kw +
- Transmitter TV
- 0-50w 50-1kw 2kw-10kw
- FM Antenna
- Antena TV
- antena Aksesori
- Kabel konektor kekuatan Splitter Dummy load
- RF Transistor
- Sumber Daya listrik
- Peralatan Audio
- DTV Front End Peralatan
- Link Sistem
- sistem STL Link sistem microwave
- Radio FM
- Pengukur daya
- Produk-produk lain
- Khusus untuk Coronavirus
produk Tags
Situs Fmuser
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> Afrikans
- sq.fmuser.net -> Albania
- ar.fmuser.net -> Arab
- hy.fmuser.net -> Armenia
- az.fmuser.net -> Azerbaijan
- eu.fmuser.net -> Basque
- be.fmuser.net -> Belarusia
- bg.fmuser.net -> Bulgaria
- ca.fmuser.net -> Catalan
- zh-CN.fmuser.net -> Cina (Sederhana)
- zh-TW.fmuser.net -> Mandarin (Tradisional)
- hr.fmuser.net -> Kroasia
- cs.fmuser.net -> Ceko
- da.fmuser.net -> Denmark
- nl.fmuser.net -> Belanda
- et.fmuser.net -> Estonia
- tl.fmuser.net -> Filipina
- fi.fmuser.net -> Finlandia
- fr.fmuser.net -> Perancis
- gl.fmuser.net -> Galicia
- ka.fmuser.net -> Georgia
- de.fmuser.net -> Jerman
- el.fmuser.net -> Yunani
- ht.fmuser.net -> Kreol Haiti
- iw.fmuser.net -> Ibrani
- hi.fmuser.net -> Hindi
- hu.fmuser.net -> Hongaria
- is.fmuser.net -> Islandia
- id.fmuser.net -> Bahasa Indonesia
- ga.fmuser.net -> Irlandia
- it.fmuser.net -> Italia
- ja.fmuser.net -> Jepang
- ko.fmuser.net -> Korea
- lv.fmuser.net -> Latvia
- lt.fmuser.net -> Lithuania
- mk.fmuser.net -> Makedonia
- ms.fmuser.net -> Melayu
- mt.fmuser.net -> Malta
- no.fmuser.net -> Norwegia
- fa.fmuser.net -> Persia
- pl.fmuser.net -> Polandia
- pt.fmuser.net -> Portugis
- ro.fmuser.net -> Rumania
- ru.fmuser.net -> Rusia
- sr.fmuser.net -> Serbia
- sk.fmuser.net -> Slowakia
- sl.fmuser.net -> Slovenia
- es.fmuser.net -> Spanyol
- sw.fmuser.net -> Swahili
- sv.fmuser.net -> Swedia
- th.fmuser.net -> Thailand
- tr.fmuser.net -> Turki
- uk.fmuser.net -> Ukraina
- ur.fmuser.net -> Urdu
- vi.fmuser.net -> Vietnam
- cy.fmuser.net -> Welsh
- yi.fmuser.net -> Yiddish
Perbedaan Antara Encoders Mutlak dan Tambahan?
Pada artikel ini, kita akan membahas berbagai jenis enkoder dan enkoder mana yang dapat digunakan untuk fungsi mana.
Dalam pelajaran sebelumnya, kita membahas apa itu Encoder dan bagaimana itu dapat diimplementasikan dalam aplikasi Anda. Pada artikel ini, kita akan membahas perbedaan antara encoder Absolute dan Incremental dan yang mana yang dapat digunakan untuk fungsi yang mana.
Jenis dan Teknologi Encoder
Ada banyak jenis encoders tetapi mereka pada dasarnya jatuh ke dalam dua teknik penginderaan utama. Mereka adalah:
- Linier
- Putar
Di dalam kategori-kategori tersebut, ada beberapa tipe pengukuran encoder yang berbeda seperti:
- Mutlak
- Tambahan
Ada juga berbagai teknologi elektromekanis seperti:
- Magnetik
- Optik
- Induktif
- Kapasitif
- Laser
Ada sejumlah besar informasi mengenai Encoders dan mungkin terasa sulit untuk membungkus kepala Anda.
Deskripsi seperti rotari atau linier, optik dan magnetik, absolut dan tambahan.
Kami menyentuh beberapa dasar untuk membantu Anda memahami apa dan mengapa.
Pertama-tama, mari kita pilah beberapa kategori ini dan jelaskan beberapa dari sekian banyak konfigurasi.
1. Encoder Linear
Pertama, Linear Encoder menggunakan transduser untuk mengukur jarak antara dua titik. Encoders ini dapat menggunakan batang atau kabel yang dijalankan antara transduser encoder dan objek yang akan diukur untuk pergerakan.
Saat objek bergerak, data transduser yang dikumpulkan dari batang atau kabel menciptakan sinyal output yang linier dengan pergerakan objek.
Saat jarak diukur, Linear Encoder menggunakan informasi ini untuk menentukan posisi objek.
Contoh di mana Linear Encoder dapat digunakan adalah untuk mesin penggilingan CNC di mana pengukuran gerakan yang tepat diperlukan untuk akurasi dalam pembuatan.
Encoder Linear bisa “Absolute” atau “Incremental”. Kami akan menyentuh pada pengukuran Absolute dan Incremental sedikit kemudian di artikel ini.
2. Penyandi (Poros) Putar
Rotary Encoder mengumpulkan data dan memberikan umpan balik berdasarkan rotasi objek atau dengan kata lain, perangkat berputar.
Rotary Encoders kadang-kadang disebut "Shaft Encoders". Jenis enkoder ini dapat mengubah posisi sudut atau gerakan objek berdasarkan rotasi poros, tergantung pada jenis pengukuran yang digunakan.
“Absolute Rotary Encoders” dapat mengukur posisi “angular” sementara “Rotary Encoders Tambahan” dapat mengukur hal-hal seperti jarak, kecepatan, dan posisi.
Rotary Encoder digunakan dalam berbagai bidang aplikasi seperti perangkat input komputer seperti mouse dan trackball serta robotika.
Rotary atau Shod encoders, seperti yang dinyatakan sebelumnya, mungkin "Absolute" atau "Incremental".
3. Posisi Encoder
Encoder berikutnya, yang merupakan "Posisi" Encoder, digunakan untuk menentukan posisi mekanik suatu objek. Posisi mekanis ini adalah "posisi absolut".
Mereka juga dapat digunakan untuk menentukan perubahan posisi antara encoder dan objek juga. Perubahan posisi dalam kaitannya dengan objek dan encoder akan menjadi perubahan tambahan.
Position Encoders banyak digunakan di arena industri untuk merasakan posisi tooling dan multi-axis positioning.
Encoder Posisi juga bisa Absolute atau Incremental.
4. Encoder Optik
Encoder “Optik” menginterpretasikan data dalam pulsa cahaya yang kemudian dapat digunakan untuk menentukan hal-hal seperti posisi, arah, dan kecepatan.
Poros memutar disk dengan segmen buram yang mewakili pola tertentu. Encoders ini dapat menentukan pergerakan suatu objek untuk aplikasi "rotari" atau "poros" sambil menentukan posisi yang tepat dalam fungsi "linear".
Enkoder optik digunakan dalam berbagai aplikasi seperti printer, mesin penggilingan CNC, dan robot.
Sekali lagi, pembuat enkode ini mungkin Mutlak atau Bertambah.
Setelah menjelaskan grup utama, Anda mungkin melihat sebuah pola.
Semua encoders pada dasarnya melakukan hal yang sama, menghasilkan sinyal listrik yang kemudian dapat diterjemahkan ke posisi, kecepatan, sudut, dll.
Encoder Mutlak vs. Encoder Tambahan
Sekarang kita telah memecah kelompok utama, mari kita bahas perbedaan antara pengukuran Absolute dan Incremental.
Untuk membahas perbedaan antara pengukuran absolut dan inkremental, kami akan menggunakan tipe Rotary Encoder sebagai contoh.
Dalam enkoder jenis pengukuran “Absolute” Rotary, disc slotted pada poros digunakan bersama dengan perangkat pickup stasioner. Ketika poros berputar, pola kode yang unik dihasilkan. Ini berarti bahwa setiap posisi poros memiliki pola dan pola ini digunakan untuk menentukan posisi yang tepat.
Jika daya ke enkoder hilang dan poros diputar, saat daya dilanjutkan, enkoder akan mencatat posisi absolut seperti yang ditunjukkan oleh pola unik yang ditransmisikan oleh disk dan diterima oleh pikap.
Jenis pengukuran ini lebih disukai dalam aplikasi yang membutuhkan tingkat kepastian yang besar seperti ketika keselamatan menjadi perhatian utama. Karena pembuat enkode tahu, setiap saat, posisi definitifnya berdasarkan pola unik yang dihasilkan.
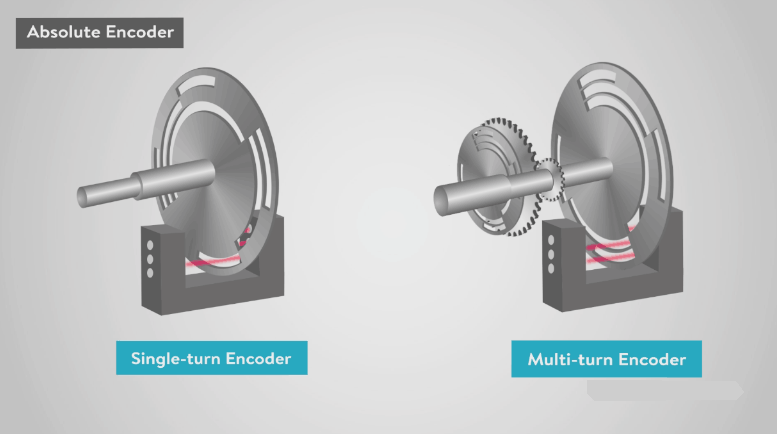
Encoders pengukuran absolut bisa
- Putar tunggal
or
- Multi-turn
"Single-turn" encoders digunakan untuk pengukuran jarak pendek sementara "multi-turn" akan lebih cocok untuk jarak yang lebih jauh dan persyaratan penentuan posisi yang lebih kompleks.
Untuk encoders ukuran tambahan, sinyal output dibuat setiap kali poros memutar jumlah yang diukur. Sinyal keluaran itu kemudian ditafsirkan berdasarkan jumlah sinyal per revolusi.
Encoder inkremental memulai hitungannya pada nol saat dinyalakan. Berbeda dengan encoder absolut, tidak ada perlindungan tentang posisi.
Karena encoder inkremental memulai hitungannya nol pada saat startup atau gangguan daya, maka perlu untuk menentukan titik referensi untuk semua tugas yang membutuhkan penentuan posisi.
Encoders dalam Menghitung Aplikasi
Dalam artikel sebelumnya, saat menjelaskan penggunaan enkoder untuk tujuan penghitungan, contoh itu adalah contoh yang baik dari enkoder inkremental.
Asumsikan bahwa daya tidak terganggu dan Anda telah menghidupkan conveyor, dan menempatkan mesin dalam mode pengaturan.
Ketika encoder berputar, controller menerima jumlah. Misalkan rentang hitungannya adalah 0 hingga 10000.
Ini adalah enkoder tambahan sehingga posisi absolutnya tidak diketahui, kami hanya tahu bahwa revolusi penuh poros mencatat 10000.
Kami akan menempatkan objek pada conveyor dan, segera setelah sensor foto-mata masuk mendeteksi objek, jumlah encoder saat ini ditangkap. Katakanlah angka itu adalah 5232.
Kami kemudian akan menangkap hitungan dengan objek yang keluar dan terdeteksi oleh mata-foto keluar. Kita akan mengatakan bahwa jumlahnya adalah 6311. Jadi untuk menentukan jumlah perjalanan penuh, kita akan mengurangi 5232 dari 6311 dan menentukan bahwa perjalanan objek adalah 1079 jumlah.
Dengan contoh ini, jelas bahwa kita tidak tahu lokasi absolut dari objek, kita hanya tahu bahwa jumlah perjalanan dari pintu masuk ke pintu keluar adalah 1079.
Itu tidak memberi tahu kita bahwa objek berjarak tiga inci dari pintu keluar, hanya masuk, dll.
kita hanya tahu bahwa objek akan masuk, hitungan akan ditangkap, dan objek akan keluar dan lagi, hitungan ditangkap.
Jika kami tidak melihat objek yang keluar dalam jumlah perjalanan yang diizinkan, plus atau minus deadband, mesin akan mengalami kesalahan dan proses akan berhenti.
Ada banyak variasi encoder di luar sana dan kita bisa terus berjam-jam tentang berbagai jenis.
Mudah-mudahan, kami telah memberi Anda pemahaman dasar tentang apa yang ada di luar sana dan kapan Anda mungkin ingin memilih satu jenis tertentu dari yang lain.
